
Герасимов С. А., Россия
В работе представлены результаты экспериментального изучения движения, которое вызывается колебаниями внутренней массы системы тел, сопровождаемыми столкновениями несбалансированного груза с внешним телом. Данный тип движителя известен под несколькими именами. Среди них — вибродвижитель и безопорная машина. Иногда он называется инерцоидом [1,2]. Известно, что вибрационное перемещение происходит за счет внутренних сил системы тел [3-5]. Считается, что инерцоид Толчина [6] является первым устройством, использующим силы инерции для создания безопорного неограниченного движения в пространстве. Мы пока не в состоянии судить об этом. Существует ряд проектов таких машин, однако экспериментальные результаты, касающиеся этого типа движения, чрезвычайно скудны. Ниже представлены экспериментальные результаты по средним скоростям такого движения и описание движителя, основной особенностью которого является отсутствие традиционного привода.

В настоящем движителе несбалансированным телом массы m является электродвигатель E, который совершает незатухающие колебания относительно платформы, обладающей массой M и имеющей четыре колеса W. Платформа может двигаться по горизонтальной поверхности L с коэффициентом трения k. Сила трения качения определяется здесь как сила, которая противодействует движению системы по плоскости. Дисковый кулачок C на одном конце оси мотора обеспечивает заданный характер колебаний и упругий удар между грузом m и ведомым звеном B радиуса a кулачкового механизма. В настоящем проекте кулачок C состоит из двух половин дисков с различными радиусами г=0,03м, R=0,05м и a=0,0^. Электродвигатель и платформа соединены пружиной S. Сила F, с которой кулачок прижат к ведомому звену, линейно меняется от F=4H при х=0,04м до F=4,8H при х = 0,08м. Соединяющая пружина необходима не только для обеспечения контакта между кулачком и ведомым звеном B. Пружина производит перемещение платформы в противоположном силе F направлении, когда ведомое звено движется без контакта от x=2R-r+a до x=r+a. Упругий удар приостанавливает перемещение. Возможен также другой режим перемещения, когда столкновение ведомого звена с кулачком является причиной перемещения платформы в направлении силы F. В этом случае сила трения гасит перемещение платформы.
Трение между грузом массы m и платформой пренебрежимо мало, поскольку соответствующий эффективный коэффициент трения составляет менее 0,001. То же самое относится к трению между кулачком и ведомым звеном. Масса пружины mS=0,007 кг, а масса кулачка — mc=0,019 кг. Полная масса колес составляет mW=0,082 кг. Эта величина может быть использована в теоретическом анализе явления. Таким образом, полная масса несбалансированного тела выбрана таким образом, чтобы она было намного больше, чем масса кулачка или пружины: т = шЕ+ тс+ ms~mE.
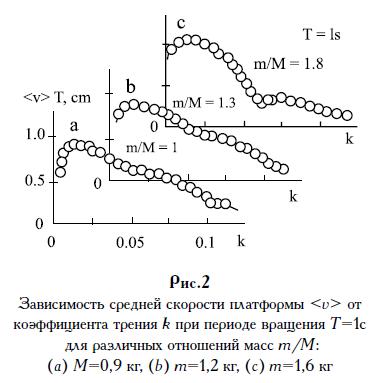 По крайней мере, в случае нереверсивного режима, можно ожидать, что величина средней скорости перемещения <v> должна быть пропорциональна числу ударов в единицу времени. Другими словами, путь, проходимый платформой за одно столкновение, не должен зависеть от частоты колебаний. Это является причиной того, что в настоящей работе исследуется зависимость произведения <v>T от коэффициента трения k и отношения масс d=m/M. Измерения проводились для двух значений периода вращения кулачка Т=1с и Т=6с. Полученные результаты представлены на рис. 2 и рис.3. Прежде всего следует указать что, отмеченное выше предположение не подтверждается. Величина <v>T для периода вращения Т=1с значительно отличается от аналогичной величины при Т=6с.
По крайней мере, в случае нереверсивного режима, можно ожидать, что величина средней скорости перемещения <v> должна быть пропорциональна числу ударов в единицу времени. Другими словами, путь, проходимый платформой за одно столкновение, не должен зависеть от частоты колебаний. Это является причиной того, что в настоящей работе исследуется зависимость произведения <v>T от коэффициента трения k и отношения масс d=m/M. Измерения проводились для двух значений периода вращения кулачка Т=1с и Т=6с. Полученные результаты представлены на рис. 2 и рис.3. Прежде всего следует указать что, отмеченное выше предположение не подтверждается. Величина <v>T для периода вращения Т=1с значительно отличается от аналогичной величины при Т=6с.
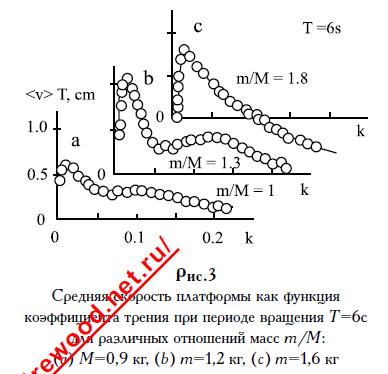 Кроме того, когда величина отношения масс становится значительной, платформа может изменить направление движения. Причина этих результатов недостаточно ясна, однако это устройство дает стимул к объяснению и исследованию данного типа перемещения, что, в свою очередь, позволит обнаружить безопорное движение, если, конечно, оно существует. Необходимо обратить внимание на тот факт, что инфинитное перемещение платформы имеет место, даже если коэффициент трения очень мал.
Кроме того, когда величина отношения масс становится значительной, платформа может изменить направление движения. Причина этих результатов недостаточно ясна, однако это устройство дает стимул к объяснению и исследованию данного типа перемещения, что, в свою очередь, позволит обнаружить безопорное движение, если, конечно, оно существует. Необходимо обратить внимание на тот факт, что инфинитное перемещение платформы имеет место, даже если коэффициент трения очень мал.
Список Литературы
1. Гулиа Н.В. Инерция. // Москва: Наука. 1982.
2. Aspden H. Anti-gravity Electronics. // Electron and Wireless World. 1989. V. 95. No 1635. P. 29-31.
3. Nappo F. Sulla Influenza Indiretta Delle Forze Inertne sul Moto del Baricentro. // La Ricerca Scientifica (Rendiconti). 1965. V. 8. No 1. P. 3-14.
4. Герасимов С.А. Анизотропия силы трения и вибрационное перемещение. // Вопросы прикладной физики. 2001. Вып. 7. С. 85-88.
5. Герасимов С.А. Автомодельность вибрационного перемещения в среде с сопротивлением. // Прикладная механика и техническая физика. 2002. Т. 43. № 1. С. 108-111.
6. Толчин В.Н. Инерцоид. // Пермь: Пермское книжное издательство. 1977.
Об авторе
 Герасимов Сергей Анатольевич в 1976
Герасимов Сергей Анатольевич в 1976
закончил Факультет экспериментальной Н и теоретической физики Московского инженерно-физического института. , Степень кандидата физико» математических наук получил в 1987 году. Автор около 70 работ по астрофизике, атомной и радиационной физике, классической электродинамике и механике. В настоящее время — доцент кафедры общей физики Ростовского-на-Дону государственного университета. Область научных интересов — спорные вопросы физики: самодействие, самоперемещение, униполярная индукция.
Физический факультет РГУ, ул. Зорге, 5, г. Ростов-на-Дону, 344090 Email: GSIM1953@mail.ru